发那科机器人负载惯量什么意思
的有关信息介绍如下:
负载设置有两种类型,一种是自动估算,另一种是手动输入。一些FANUC机器人在购买时未加载自动估算软件选件,因此需要手动输入。
目前,您多可以设置10个有效负载。首先检查设置路径:菜单----系统---- F1类型----在示教器界面上移动,进入下图所示的界面
只需激活进入界面所需的装载编号即可。例如,按F5 SETIND,将出现以下界面,输入要激活的有效负载的编号,然后按Enter确认。
这些是选择负荷编号的方法。所选的有效负载编号必须是已设置的有效负载编号。如果未设置,它将提示无效负载,因此将生成无效负载和其他提示。
关于手动输入法:
仍然是这个路径:菜单----系统---- F1类型----运动
在上图所示的屏幕中,按F3 DETAIL,将出现下图。在每个项目中输入数据
发那科机器人
由于该数据是变量,因此每个工具的设置数据都不同。您需要根据实际工具设计负载和当前机器人场的重心来估算此值,然后填写此表。下表描述了输入内容数据(仅需要进行相应的设置)
FANUC机器人零件
FANUC机器人伺服产品项目
FANUC机器人伺服产品
描述
时间表编号
显示有效载荷清单编号
有效载荷
单位:公斤
臂端子工具的重量
有效载荷中心X
单位:厘米
载荷重心在法兰中心上方和下方的偏移为正。
负载中心Y
单位:厘米
从法兰后部的角度看,负载重心在法兰中心的两侧相对于法兰中心的右侧为正。
有效载荷中心Z
单位:厘米
载荷重心在法兰中心处的偏移,法兰向外的偏移为正
有效负载X
单位:kgfcms ^ 2
FANUC机器人零件
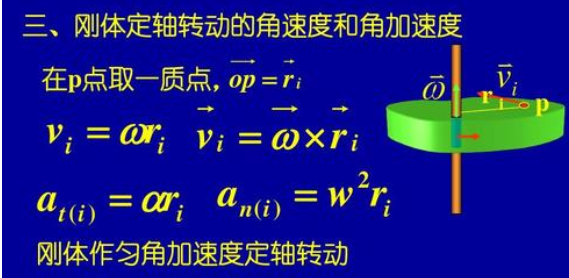
负载绕平行于工具坐标系X方向的轴旋转,并通过负载重心的惯性矩
发那科机器人
有效负载惯量
单位:kgfcms ^ 2
FANUC机器人零件
负载绕平行于工具坐标系Y方向的轴旋转,并通过负载重心的惯性矩
发那科机器人
有效负载惯量Z
单位:kgfcms ^ 2
FANUC机器人伺服产品
负载绕平行于工具坐标系Z轴的轴旋转,并通过负载重心的惯性矩
更多咨询:发那科机器人
首页
产品中心
新闻
1位粉丝
负载设置有两种类型,一种是自动估算,另一种是手动输入。一些FANUC机器人在购买时未加载自动估算软件选件,因此需要手动输入。
目前,您多可以设置10个有效负载。首先检查设置路径:菜单----系统---- F1类型----在示教器界面上移动,进入下图所示的界面
只需激活进入界面所需的装载编号即可。例如,按F5 SETIND,将出现以下界面,输入要激活的有效负载的编号,然后按Enter确认。
这些是选择负荷编号的方法。所选的有效负载编号必须是已设置的有效负载编号。如果未设置,它将提示无效负载,因此将生成无效负载和其他提示。
关于手动输入法:
仍然是这个路径:菜单----系统---- F1类型----运动
在上图所示的屏幕中,按F3 DETAIL,将出现下图。在每个项目中输入数据
发那科机器人
由于该数据是变量,因此每个工具的设置数据都不同。您需要根据实际工具设计负载和当前机器人场的重心来估算此值,然后填写此表。下表描述了输入内容数据(仅需要进行相应的设置)
FANUC机器人零件
FANUC机器人伺服产品项目
FANUC机器人伺服产品
描述
时间表编号
显示有效载荷清单编号
有效载荷
单位:公斤
臂端子工具的重量
有效载荷中心X
单位:厘米
载荷重心在法兰中心上方和下方的偏移为正。
负载中心Y
单位:厘米
从法兰后部的角度看,负载重心在法兰中心的两侧相对于法兰中心的右侧为正。
有效载荷中心Z
单位:厘米
载荷重心在法兰中心处的偏移,法兰向外的偏移为正
有效负载X
单位:kgfcms ^ 2
FANUC机器人零件
负载绕平行于工具坐标系X方向的轴旋转,并通过负载重心的惯性矩
发那科机器人
有效负载惯量
单位:kgfcms ^ 2
FANUC机器人零件
负载绕平行于工具坐标系Y方向的轴旋转,并通过负载重心的惯性矩
发那科机器人
有效负载惯量Z
单位:kgfcms ^ 2
FANUC机器人伺服产品
负载绕平行于工具坐标系Z轴的轴旋转,并通过负载重心的惯性矩
FANUC机器人负载手动设置方法参考
负载设置有两种类型,一种是自动估算,另一种是手动输入。一些FANUC机器人在购买时未加载自动估算软件选件,因此需要手动输入。
目前,您多可以设置10个有效负载。首先检查设置路径:菜单----系统---- F1类型----在示教器界面上移动,进入下图所示的界面
只需激活进入界面所需的装载编号即可。例如,按F5 SETIND,将出现以下界面,输入要激活的有效负载的编号,然后按Enter确认。
这些是选择负荷编号的方法。所选的有效负载编号必须是已设置的有效负载编号。如果未设置,它将提示无效负载,因此将生成无效负载和其他提示。
关于手动输入法:
仍然是这个路径:菜单----系统---- F1类型----运动
在上图所示的屏幕中,按F3 DETAIL,将出现下图。在每个项目中输入数据
发那科机器人
由于该数据是变量,因此每个工具的设置数据都不同。您需要根据实际工具设计负载和当前机器人场的重心来估算此值,然后填写此表